












JR3504

JR3504
Broaden your manufacturing potential with Janome flagship desktop robot.
The JR3000 Series is a multifunctional robot designed with both cell production sites and automated inline installation in mind. With a rich catalog of functions including Fieldbus compatibility, a built-in LAN port as standard equipment, software that makes camera installation easy and the ability to control up to two external motors, the JR3000 is ready to fill many different manufacturing roles.
Increased Structural Rigidity
The robot is made even more rigid, which makes i t faster (up to 900 mm/s), more accurate, and able to operate non-stop for extended periods.
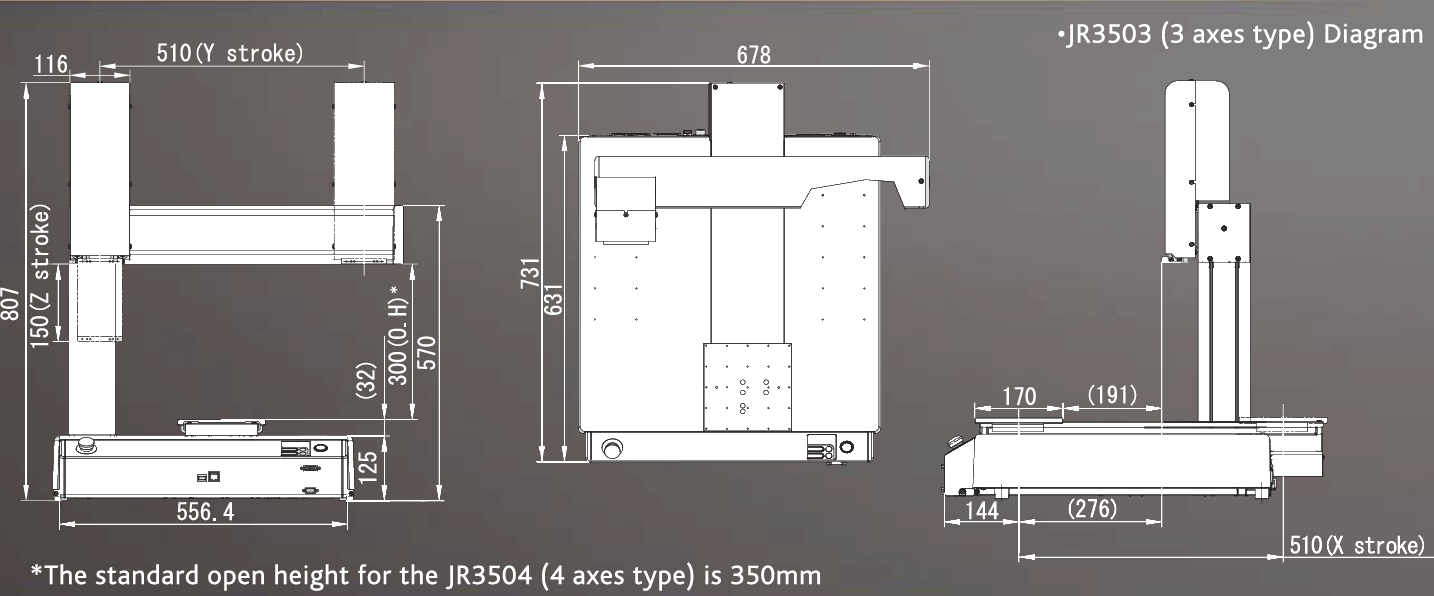
| Operating Range | X & Y Axis | 510 x 510 mm |
| Z Axis | 150 mm | |
| R Axis | ±360°C | |
| Maximum Portable Load | X Axis (Workpiece) | 15 kg |
| Y Axis (Tool) | 7 kg | |
| Maximum Speed (PTP Drive)1 = Settable Speed Range | X & Y Axis | 900 mm/sec [9-900 mm/sec] |
| Z Axis | 400 mm/sec [4-400 mm/sec] | |
| R Axis | 900°/sec [9-900°/sec] | |
| Maximum Speed (CP Drive)1 = Settable Speed Range | X, Y, Z Combined | 850 mm/sec [0.1-850 mm/sec] |
| Repeatability2 | X & Y Axis | ±0.01 mm |
| Z Axis | ±0.01 mm | |
| R Axis | ±0.008° | |
| External Dimensions3 W x D x H | 678 x 731 x 894 mm | |
| Robot Weight3 | 47 kg | |
| Drive Method | 5 Phase Pulse Motor (optional encoder attachment) | |
| Control Method | PTP Control, CP Control | |
| External Input | I/O-SYS | 16 Inputs |
| I/O-14 | 8 Inputs | |
| External Output | I/O-SYS | 16 Outputs |
| I/O-14 | 8 Outputs (including 4 relay outputs) | |
| R Axis Acceptable moment of Inertia | 90kg·cm2 | |
| Power Source | AC 90 - 125V / AC 180 - 240V (single phase) | |
| Power Consumption | 200 W | |
| Operating Enviroment Temperature | 0-40ºC | |
1 Maximum speed can vary depending upon conditions. The robot cannot reach maximum speed when bearing the maximum portable load.
2 Repeatability was measured at a constant temperature and does not represent a guarantee of absolute precision
3 The external dimensions and robot weight differ for JR 3400 Double Column Specifications.
4 For the JR3200 series, choose only one optional add-on: I/O-1 or I/O-MT